

مفهوم Physical Metaverse و کارکرد Avatarm
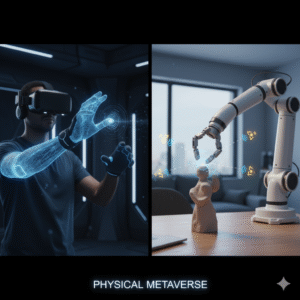
متاورس به طور معمول فضایی است که کاربران از طریق نمایشگر واقعیت مجازی یا افزوده با محتوا و دیگر افراد ارتباط برقرار میکنند. در این فضا، اشیاء دیجیتال دستکاری میشوند اما امکان لمس، گرفتن یا حرکت دادن اشیاء فیزیکی وجود ندارد. Avatarm این نقص را برطرف کرده است. این سامانه از یک بازوی رباتیک استفاده میکند که در دنیای واقعی اجسام را حرکت میدهد، اما کاربران آن را نمیبینند؛ در عوض، در محیط متاورسی، تصویر دستی مجازی میبینند که همان کار را انجام میدهد.
ویژگیهای فنی مهم پروژه Avatarm
- بازوی رباتیک مخفی: روبات در محیط فیزیکی کار میکند اما در تصویر متاورسی حذف میشود (از طریق تکنیک تکنولوژی diminished reality) تا کاربر فقط دست مجازی خود را ببیند.
- بازتاب دیجیتال اشیاء واقعی: وقتی بازویی مجازی جسمی را حرکت میدهد، همان جسم فیزیکی در دنیای واقعی حرکت میکند. تصویر آن جسم فیزیکی و دیجیتالی در محیط تطبیق مییابد.
- بازخورد لمسی و هپتیک (Force & Vibrotactile Feedback): پروژه Avatarm تلاش میکند احساس لمس، فشار و بافت را به کاربر منتقل کند تا حس واقعگرایانهتر شود.
- همزمانی دیجیتال و فیزیکی: موقعیت و جهت جسم فیزیکی با مدل دیجیتال آن تطابق داده میشود تا در متاورس تأخیری احساس نشود.
- آواتار تعاملی: کاربران علاوه بر تعامل با اشیاء فیزیکی، در محیط افزوده یا ترکیبی حضور مجازی (avatar) دارند که حرکات دست مجازیشان را نمایش میدهد.
مزایا و فرصتها
Avatarm فرصتهای جدیدی برای متاورس ایجاد میکند:
- تجربه حضور واقعیتر: کاربران حس میکنند فقط نمای دیجیتال از تعامل میان بدنشان و اشیاء فیزیکی وجود ندارد، بلکه بدن و محیط واقعی هم دخیل است.
- پتانسیل در آموزش و شبیهسازی: مثلاً شبیهسازی فرآیندهای کاربردی مثل تمرین پزشکی، آموزش کارگاهی، تعمیر فیزیکی اشیاء یا کار با ابزار خطرناک.
- فناوری برای افراد دارای معلولیت: کمک به آنها تا از راه دور اجسامی را حرکت دهند یا لمس کنند بدون حضور فیزیکی.
- افزایش واقعگرایی در بازیها، هنر تعاملی و فضاهای اجتماعی مجازی؛ کسی میتواند در متاورس واقعاً چیزی را لمس کند نه فقط تصویر آن را ببنید.
چالشها و محدودیتها
اگرچه پروژه Avatarm امیدوارکننده است، مشکلات فنی و عملیاتی جدی وجود دارند که باید حل شوند:
- پیچیدگی مکانیکی بازوی رباتیک و تضمین دقت حرکت آن در دنیای فیزیکی.
- هزینه ساخت و نگهداری سختافزار مخصوص (ربات، حسگرها، دوربینها) بالا است.
- نیاز به اینترنت بسیار پایدار و کم تأخیر برای همگامسازی دقیق بین دنیای واقعی و تصویر دیجیتال.
- مسائل ایمنی و بهداشتی، مخصوصاً در تماس فیزیکی با اجسام - باید اطمینان حاصل شود که کاربر در معرض خطر آسیب یا آلرژن و آلودگی نباشد.
- مسائل اخلاقی و حقوقی در مالکیت و مسئولیت اثرات فیزیکی تعامل؛ چه کسی مسئول است اگر جسم آسیب ببیند؟
پیشرفتها و آزمایشهای انجامشده
محققان Avatarm تا کنون آزمایشهای متعددی را انجام دادهاند که شامل مقایسه بین تعاملهای دیجیتال معمولی و تعاملهایی است که بازخورد لمسی دارند. آنها دریافتند شرکتکنندگان تجربهٔ حضور و «واقعیت لمس» را در محیطهایی که بازوی رباتیک و بازخورد لمسی همزمان فعال بودهاند، بسیار بالاتر گزارش کردهاند.
در برخی آزمایشها شرکتکنندگان توانستند اشیاء کوچک را در محیط فیزیکی جابهجا کنند، بهطوری که آواتار آنها در محیط مجازی همان حرکت را نشان دهد. این عملکرد نشاندهندهٔ قابلیت اجراپذیری فناوری در شرایط کنترلشده است.

چشمانداز آینده Avatarm و چشمانداز متاورس فیزیکی
محققان قصد دارند نسخههای پیشرفتهتر Avatarm را با بازخورد لمسی بیشتر، ظریفتر و طبیعیتر توسعه دهند. از جمله تلاش برای کاهش تأخیر، بهبود کیفیت هپتیک، کاهش حجم سختافزار و یافتن راهکارهای مقرونبهصرفه برای استفادهٔ عمومی.
در آینده ممکن است Avatarm در صنایع مختلف کاربرد یابد: پزشکی، آموزش، سرگرمی، تولید، هنر تعاملی و حتی استفادهٔ روزمره در خانه. هرجا که لمس و فیزیک اهمیت دارد، این فناوری میتواند تحول ایجاد کند.
جمعبندی
پروژه Avatarm نشان میدهد متاورس دیگر فقط فضای مجازی نیست؛ دنیایی را میسازد که در آن لمس، حرکت و تعامل فیزیکی با اشیاء امکانپذیر است. این فناوری، اگر به مرحلهٔ تولید گسترده برسد، میتواند تجربهٔ کاربری متاورس را متحول کند - از تعاملات دیجیتال ساده فراتر روند و به احساس حضور واقعی دست یابد.
با این حال، مسیر پیشرو پر از چالشهای فنی، مالی و اخلاقی است. موفقیت Avatarm وابسته به پژوهش بیشتر، همکاری میان دانشگاه و صنعت، و ایجاد استانداردهایی است که ایمنی، سازگاری و دسترسی را تضمین کنند. اگر این موارد حل شوند، ممکن است روزی دنیای واقعی و متاورس چنان درهم آمیخته شوند که تفکیکشان تقریباً ممکن نباشد.







")

